
|
GÖRÜNTÜ İŞLEME NEDİR VE NASIL ÇALIŞIR? |
GÖRÜNTÜ İŞLEME TÜRLERİ |
GÖRÜNTÜ İŞLEME METOTLARI |
GÖRÜNTÜ İŞLEME'NİN UYGULAMA ALANLARI |
|
|
Görüntü İşleme Algoritmaları
HOG (Histogram of Oriented Gradients)
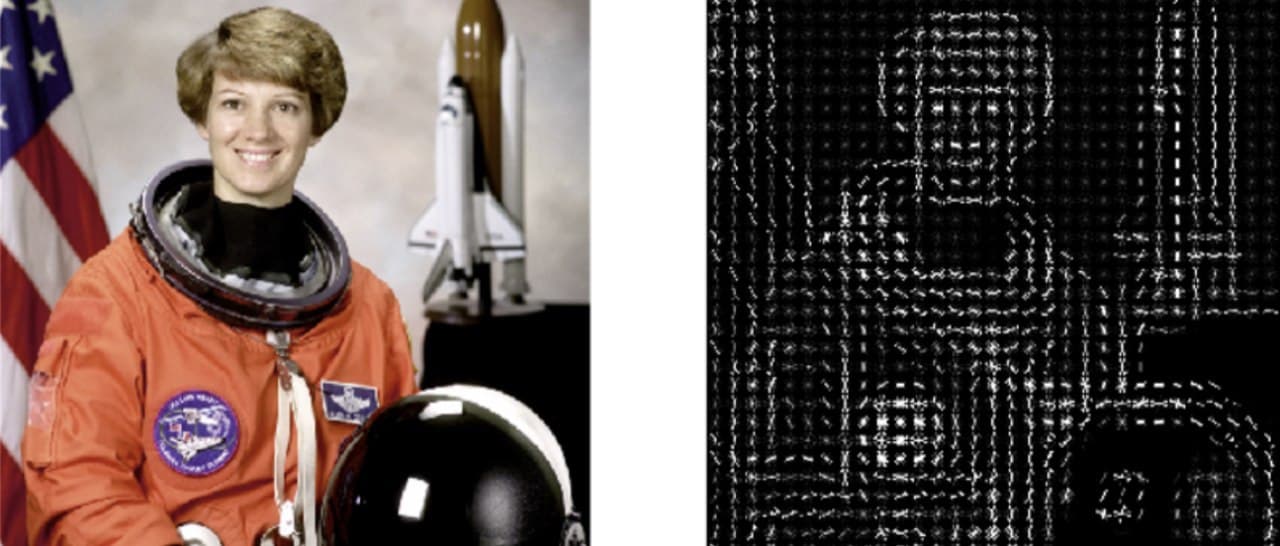
Yönlendirilmiş gradyanların histogramı (HOG), nesne algılama amacıyla bilgisayarla görme ve görüntü işlemede kullanılan bir özellik tamamlayıcısıdır. Teknik, bir görüntünün lokalize kısımlarında gradyan oryantasyonunun oluşumlarını sayar. Bu yöntem, kenar oryantasyon histogramlarına, ölçekle değişmeyen özellik dönüşümü tanımlayıcılarına ve şekil bağlamlarına benzer, ancak eşit aralıklı hücrelerden oluşan yoğun bir ızgarada hesaplanması ve gelişmiş doğruluk için örtüşen yerel kontrast normalizasyonu kullanması bakımından farklılık gösterir.
 |
GLCM (Gray Level Co-Occurrence Matrix)
Piksellerin uzamsal
ilişkisini göz önünde bulunduran dokuyu incelemenin istatistiksel bir yöntemi,
gri düzey uzamsal bağımlılık matrisi olarak da bilinen gri düzey eş oluşum
matrisidir (GLCM). GLCM işlevleri, bir görüntüde belirli değerlere ve belirli
bir uzamsal ilişkiye sahip piksel çiftlerinin ne sıklıkla oluştuğunu
hesaplayarak, bir GLCM oluşturarak ve ardından bu matristen istatistiksel
ölçüleri çıkararak görüntünün dokusunu karakterize eder.
GLCM algoritması bize birçok öznitelik verir.
Bunlardan en yaygın olarak kullanılan 4 öznitelik tablodaki gibidir:
CCM (Color Co-Occurrence Matrix)
Birlikte oluşum matrisi veya birlikte oluş dağılımı, bir görüntü üzerinde birlikte oluşan piksel değerlerinin belirli bir ofsette renk dağılımı olarak tanımlanan bir matristir. Özellikle tıbbi görüntü analizinde çeşitli uygulamalarla doku analizine yaklaşım olarak kullanılmaktadır. RGB görüntüler için her bir renk kanalının (red, green, blue) matris olarak ifade edilmesi ile oluşan 3 boyutlu dizilimin komşuluk değerleri Color Co-Occurrence Matrix algoritması ile öznitelik çıkarımında çok önemlidir. Renk dağılımı ve yoğunluk bilgilerinin detaylı verildiği öznitelik vektörünü ile büyük veriden renk bazında anlamlı veriler çıkarılabilir ve makine öğrenmesi yöntemleri ile veriler sınıflandırılabilir.
 |
PCA (Principal Components Analysis)
PCA, en çok kullanılan boyut azaltma tekniğinden biridir. PCA’ yı kullanırken, orijinal verilerimizi girdi olarak alırız ve orijinal veri dağılımını en iyi şekilde özetlenebilecek girdi özelliklerinin bir kombinasyonunu bulmaya çalışırız, böylece orijinal boyutlarını küçültebiliriz. PCA, çift yönlü mesafelere bakarak varyansları en üst düzeye çıkararak ve yeniden yapılandırma hatasını en aza indirerek bunu yapabilir. PCA’ da, orijinal verilerimiz bir dizi ortogonal eksene yansıtılır ve her bir eksen önem sırasına göre sıralanır.
 |
SIFT (Scale Invariant Feature Transform)
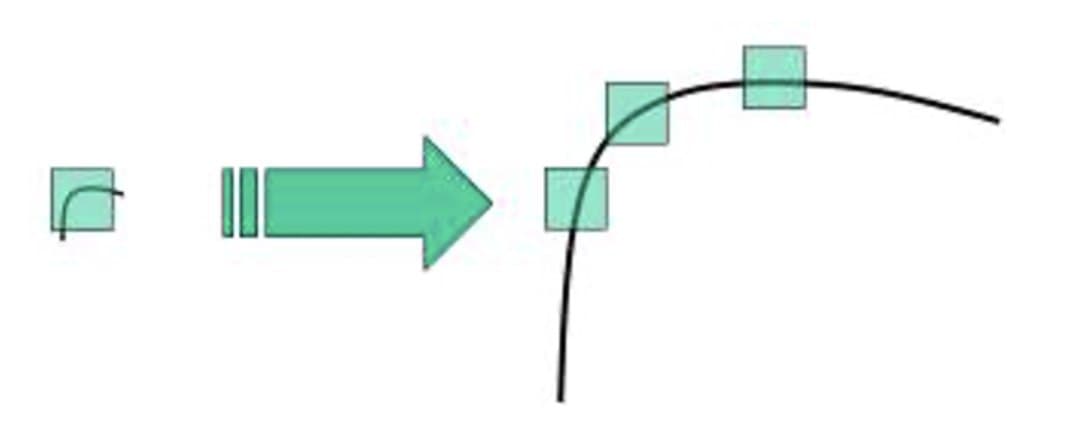
Bazı görüntüler dönüşle değişmezler, yani görüntü döndürülse bile aynı köşeleri bulabiliriz. Açıktır çünkü döndürülen görüntüde köşeler de köşe olarak kalır. Peki ya ölçeklendirme? Görüntü ölçeklenir ise köşe köşe olmayabilir. Örneğin, aşağıdaki basit bir resme bakın. Küçük bir pencere içindeki küçük bir görüntüdeki köşe, aynı pencerede yaklaştırıldığında düzdür. Yani Harris köşesi ölçekle değişmez değildir.
 |
Bu yüzden, 2004 yılında, British Columbia Üniversitesi’nden D. Lowe, yeni bir algoritma olan Scale Invariant Feature Transform (SIFT) makalesinde, anahtar noktaları çıkaran ve tanımlayıcılarını hesaplayan Ölçek Değişmez Anahtar Noktalarından Ayırt Edici Görüntü Özellikleri buldu. SIFT özelliği, ilişkili bir tanımlayıcıya sahip seçili bir görüntü bölgesidir (anahtar nokta olarak da adlandırılır). Anahtar noktalar SIFT detektörü tarafından çıkarılır ve bunların tanımlayıcıları SIFT tanımlayıcısı tarafından hesaplanır. Bağımsız olarak SIFT detektörünü (yani anahtar noktaları tanımlayıcılar olmadan hesaplamak) veya SIFT tanımlayıcısını (yani özel anahtar noktalarının hesaplama tanımlayıcılarını) kullanmak yaygındır.
SURF (Speeded-up Robust Features)
Bilgisayarla görmede,
hızlandırılmış sağlam özellikler (SURF), patentli bir yerel özellik algılayıcı
ve tanımlayıcıdır. Nesne tanıma, görüntü kaydı, sınıflandırma veya 3B yeniden
yapılandırma gibi görevler için kullanılabilir. Kısmen ölçekle değişmeyen
özellik dönüşümü (SIFT) tanımlayıcısından esinlenmiştir. Standart SURF sürümü,
SIFT’ den birkaç kat daha hızlıdır ve yazarları tarafından SIFT’ den farklı
görüntü dönüşümlerine karşı daha sağlam olduğu iddia edilmiştir.
SURF tanımlayıcıları, nesneleri, insanları veya
yüzleri bulmak ve tanımak, 3B sahneleri yeniden oluşturmak, nesneleri izlemek ve
ilgi çekici noktaları çıkarmak için kullanılmıştır. SURF, SIFT’in hızlandırılmış
sürümüdür. SURF biraz daha ileri gider ve LoG’ye Kutu Filtresi ile yaklaşır. Bu
yaklaşımın büyük bir avantajı, kutu filtreli evrişimin integral görüntüler
yardımıyla kolayca hesaplanabilmesidir. Ve farklı ölçekteki görüntüler de
paralel olarak aynı mantıkla hesaplanabilir. Ayrıca, SURF hem ölçek hem de konum
için Hessian matrisinin belirleyicisine güvenir. Oryantasyon ataması için SURF,
6x6 boyutundaki bir matris için yatay ve dikey yönde dalgacık yanıtlarını
kullanır. Yeterli Guassian ağırlıkları da ona uygulanır. Baskın yönelim, 60
derecelik bir kayan yönelim penceresindeki tüm tepkilerin toplamı hesaplanarak
tahmin edilir. Dalgacık tepkisi, herhangi bir ölçekte çok kolay bir şekilde
integral görüntüler kullanılarak bulunabilir. SURF, Upright-SURF veya U-SURF adı
verilen bir işlevsellik sağlar. Hızı artırır ve dayanıklıdır. OpenCV, bayrağa
bağlı olarak her ikisini de dikey olarak destekler. 0 ise yön hesaplanır. 1 ise
yönlendirme hesaplanmaz ve daha hızlıdır.